






You are here:
MultiCAN Controller
Since its introduction in the mid-1980s, the Controller Area Network (CAN) has become a standard network protocol for automotive applications. Cars manufactured today use CAN for powertrain networks, electronic stability control, diagnostics, and a variety of comfort and convenience features. The success of CAN in the automotive domain has also led to its widespread use in other applications such as industrial control and medical instrumentation where reliability and safety are critical.
MultiCAN improves upon previous CAN implementations, including TwinCAN, by adding features such as additional CAN nodes, more message objects, linked list management of message objects, and support for TTCAN level 2. For backward compatiblity, you can configure MultiCAN to provide features and functionality similar to TwinCAN.
MultiCAN is available in technology-independent, fully synthesizable source code with your choice of host processor bus interfaces: Infineon FPI, XBus, or AMBA APB.
MultiCAN improves upon previous CAN implementations, including TwinCAN, by adding features such as additional CAN nodes, more message objects, linked list management of message objects, and support for TTCAN level 2. For backward compatiblity, you can configure MultiCAN to provide features and functionality similar to TwinCAN.
MultiCAN is available in technology-independent, fully synthesizable source code with your choice of host processor bus interfaces: Infineon FPI, XBus, or AMBA APB.
查看 MultiCAN Controller 详细介绍:
- 查看 MultiCAN Controller 完整数据手册
- 联系 MultiCAN Controller 供应商
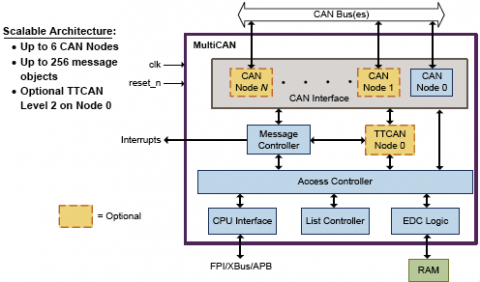
Block Diagram of the MultiCAN Controller
