








You are here:
MIMO Radar Co-processor Engine
This is a configurable and programmable highly efficient Radar Co-processor engine for high resolution MIMO Radar systems.
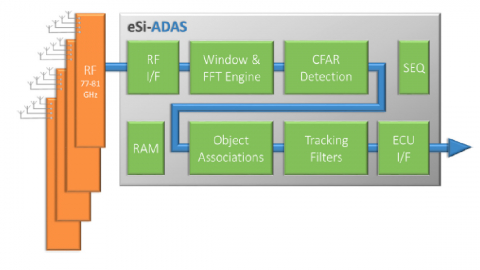
It includes a main signal processing engine that sequentially calculates Range, Doppler, Azimuth and Elevation Fourier transforms on multiple ADC channels and detects potential objects for further processing. The small set of retained detections are post processed by associating to tracks and smoothing with a Kalman Filter.
Filtered data associated with each detected object can be made available for processing by an external ML processor
It is ported to both ASIC and FPGA technology and achieving a very high clock speed with minimal logic and memory.
It includes a main signal processing engine that sequentially calculates Range, Doppler, Azimuth and Elevation Fourier transforms on multiple ADC channels and detects potential objects for further processing. The small set of retained detections are post processed by associating to tracks and smoothing with a Kalman Filter.
Filtered data associated with each detected object can be made available for processing by an external ML processor
It is ported to both ASIC and FPGA technology and achieving a very high clock speed with minimal logic and memory.
查看 MIMO Radar Co-processor Engine 详细介绍:
- 查看 MIMO Radar Co-processor Engine 完整数据手册
- 联系 MIMO Radar Co-processor Engine 供应商
Block Diagram of the MIMO Radar Co-processor Engine
